Minimal surface in differential geometry
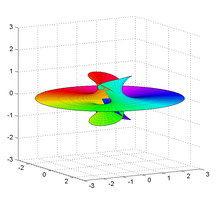 Richmond surface for m=2.
Richmond surface for m=2.
In differential geometry, a Richmond surface is a minimal surface first described by Herbert William Richmond in 1904.[1] It is a family of surfaces with one planar end and one Enneper surface-like self-intersecting end.
It has Weierstrass–Enneper parameterization  . This allows a parametrization based on a complex parameter as
. This allows a parametrization based on a complex parameter as
![{\displaystyle {\begin{aligned}X(z)&=\Re [(-1/2z)-z^{2m+1}/(4m+2)]\\Y(z)&=\Re [(-i/2z)+iz^{2m+1}/(4m+2)]\\Z(z)&=\Re [z^{m}/m]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/934419d302c2d08a3baa55573a5e858bfa3615aa)
The associate family of the surface is just the surface rotated around the z-axis.
Taking m = 2 a real parametric expression becomes:[2]


