ASC-15
From Wikipedia, the free encyclopedia

ASC-15(Advance System Controller Model 15)は、タイタンII大陸間弾道ミサイル(ICBM)に搭載するためにInternational Business Machines(IBM)が開発したデジタルコンピュータである[1][2]。その後、改良され、タイタンIIIとサターンIブロックII打上げ用ロケットで使用された。
これらのロケットの主な機能は、慣性計測装置からのデータを使用してナビゲーション計算を行うことである。また、打ち上げ前の準備点検も実行した[3]。これは、27ビットワードの固定小数点データを使用するデジタルシリアルプロセッサーである。記憶装置はドラムメモリである。電子回路は、抵抗器、トランジスタ、コンデンサ、その他のディスクリート部品を溶接し、発泡材で封入した溶接封止モジュールである。ニューヨーク州オウェゴにあるIBM工場で製造された[4]。
タイタンIIの最初の慣性誘導装置は、AC Spark Plug社が製作したもので、MITのドレイパー研究所の設計に基づいた慣性計測装置と、ニューヨーク州オウェゴのIBMによって設計および製作されたコンピュータASC-15で構成されていた。この装置を搭載した最初のタイタンIIミサイルは、1962年3月16日に打ち上げられた。この装置のスペアの入手が困難になったため、空軍は新しい装置に置き換えることを決定した。ASC-15を含むAC Spark Plug社の装置は、1978年1月から運用中のタイタンIIミサイルでデルコ・エレクトロニクス社のUniversal Space Guidance System(USGS)に置き換えられた[5]。USGSの誘導コンピュータはデルコ社製のMagic 352を用いた[6]。
ASC-15は、約45×45×30 cm(約1.5×1.5×1フィート)のアルミフレームの上に構築されていた[7]。側面、上面、底面は、金メッキされたアルミホイルで覆われたラミネート加工のプラスチックでカバーされていた。このカバーはわずかに凸状で、剛性を高めるためにリブが付けられた。カバーの中には52本のロジックスティックが収まっていて、それぞれに4つの溶接封止モジュールが収まっていた。これらは、ドラムメモリを収納するベルフレームを囲むように配置されていた[8]。図2を参照。
ドラムは、長さ7.6 cm(3インチ)、直径11.4 cm(4.5インチ)の薄肉ステンレス鋼製の円筒で、磁性ニッケル-コバルト合金でコーティングされたものである。これを同期モーターで6,000回転/毎分で駆動した。ドラムには70本のトラックがあり、そのうち58本が使用され、12本が予備であった。これらのトラックは次のように使用された。
| トラック番号 | トラックの用途 |
|---|---|
| 34 | 命令トラック |
| 7 | 定数 |
| 8 | 標的データ |
| 2 | 一時保存用データ |
| 5 | 超高速アクセスストレージ用リボルバー |
| 2 | タイミングトラック |
1本のトラックの容量は1,728ビットである。命令ワードは9ビット長で、データは27ビットワードで格納されていた[9]。
58本のトラックに合致して、67個の読み取りヘッドと13個の書き込みヘッドが備わっていた。ドラムが6,000 rpm(回転/分)で回転している間、ヘッドは薄い空気の層をはさんでドラム表面の上に浮上していた。ドラム回転が加速または減速しているときには、磁気面に傷がつかないように、ドラム筐体の上部のモーターによって駆動されるチェーンで回転するカムシャフトによって、ヘッドはドラムから持ち上げられた。図3を参照。
タイタンIII用ASC-15
サターンI用ASC-15
サターンIブロックI(ミッションSA-1、2、3、4)では誘導コンピュータは使用されなかった。SA-2の誘導装置を図4に示す[11]。ピッチプログラムは、Servo Loop Amplifier Boxに配置されたカム装置によって提供された。イベントシーケンスは、ジュピターミサイルでも使用されたプログラム装置によって制御された。これは6トラックのテープレコーダーで、一連のリレー(フライトシーケンサ)にパルスを送信して、さまざまな回路を正確なタイミングで開始または停止させた。
ASC-15は、最初に軌道に達したミッションSA-5で初飛行した。これは、最初のサターンIブロックII打上げ用ロケットである[12]。このミッションで、ASC-15はパッセンジャー(荷物)として搭載し、誘導は行わなかったが、後に評価するためにテストデータを生成した。SA-5に搭載された能動的誘導装置は、以前のフライトと同様のものであった。パッセンジャーシステムにはASC-15とST-124慣性プラットフォームが用いられた。ガイダンスはオープンループで、つまりガイダンスコマンドは時間だけの関数である。SA-5では、計器ユニット(Instrument Unit)も導入された。
ミッションSA-6では、第1段(S-I)でST-90Sオープンループ誘導を使用していたが、分離後はST-124とASC-15が経路適応誘導(クローズドループ)で第2段(S-IV)を制御した。SA-6誘導装置を図5に示す[13]。経路適応誘導の有効性は、S-IV 8番エンジンの早期停止が機体の軌道にほとんど影響を与えなかったことで思いがけず示されることになった。
SA-6に搭載されたST-90SおよびST-124システム(ASC-15誘導コンピュータを含む)の配置を図6に示す[14]。これは、SA-5、6、7で飛行した計器ユニットのバージョン1である。
ミッションSA-7では、ST-124システムが各段の発射を誘導した。 SA-7誘導制御装置を図7に示す[15]。デジタルコンピュータはASC-15である。ASC-15は、以前のミッションでS-Iチルトプログラムを格納していたカム装置と[16]、それらのミッションのイベントシーケンスを制御するプログラム装置の両方を置き換えた。
SA-7の次に飛行したミッションはSA-9である。このミッションでは、新しいバージョンの計器ユニットが搭載された。これは非加圧で、バージョン1よりも0.61 m(2フィート)短かった。バージョン2は、残りのサターンIミッション(SA-8、9、10)で飛行した。図8では、マーシャル宇宙飛行センター(MSFC)で製作中の様子が示されている[17]。図9は、この画像を拡大したもので、ダミーASC-15とダミーST-124が見える。
ギャラリー
 図1 タイタンII用ミサイル誘導コンピュータ (Missile Guidance Computer, MGC)
図1 タイタンII用ミサイル誘導コンピュータ (Missile Guidance Computer, MGC) 図2 タイタンII用ミサイル誘導コンピュータ (MGC) の分解斜視図
図2 タイタンII用ミサイル誘導コンピュータ (MGC) の分解斜視図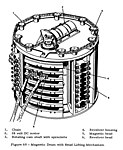 図3 タイタンII用 ASC-15のドラムメモリ
図3 タイタンII用 ASC-15のドラムメモリ 図4 サターンI SA-2用 制御装置 (SA-2 control system)
図4 サターンI SA-2用 制御装置 (SA-2 control system)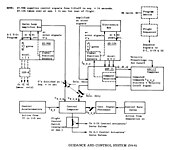 図5 サターンI SA-6用 誘導制御装置 (SA-6 guidance and control system)
図5 サターンI SA-6用 誘導制御装置 (SA-6 guidance and control system)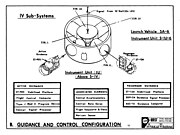 図6 サターン SA-6用 計器ユニット (Instrument Unit) バージョン1
図6 サターン SA-6用 計器ユニット (Instrument Unit) バージョン1 図7 サターンI SA-7用 誘導制御装置 (SA-7 guidance and control system)
図7 サターンI SA-7用 誘導制御装置 (SA-7 guidance and control system) 図8 マーシャル宇宙飛行センター (MSFC) で製作中のSA-8用計器ユニット (SA-8 instrument unit)
図8 マーシャル宇宙飛行センター (MSFC) で製作中のSA-8用計器ユニット (SA-8 instrument unit)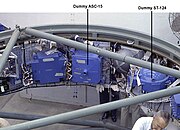 図9 SA-8計器ユニットの詳細。ASC-15用とST-124用にマークされたダミーが見える。
図9 SA-8計器ユニットの詳細。ASC-15用とST-124用にマークされたダミーが見える。






.jpg)
